TMA Commanding¶
This component is the one sending commands to the TMA and monitoring the events received from it. This is done using the TCP Client component and some other tasks that will be explained in this section. This component has two main different parts:
Command sending: this means generating the TCP message to send to the TMA using the TCP Client. This is done using the CppAppCommand.lvclass. This class is the one that generates the TCP message for each specific command and sends them to the TMA using the TCP Client.
Event reception: this means getting the messages from the TMA over the TCP Client and generating the corresponding events inside the HMI application. This is done using the GetEVENTFromTMA.lvclass. This class is responsible of parsing the events from the TMA received by the TCP Client and generate the corresponding events inside the HMI application.
In addition to these two classes there are two other classes inside the TMA Commanding component. These are:
TMAOMTMonitoring.lvclass: this class is used to monitor the status of the TMA received in the “StateInfo” events.
CommanderCheck.lvclass: this class is used to monitor the actual commander and generate the corresponding events to change the user interface and block the command sending when the actual HMI is not the commander.
Each of the classes mentioned in above are explained in the upcoming sections.
CppAppCommand.lvclass¶
This class is the one that generates the TCP message for each specific command and sends them to the TMA using the TCP Client. To do so, each subsystem has a specific class that inherits from the CppAppCommand class and has the specific commands available for that subsystem. The methods in the parent class, the CppAppCommand class, are dynamic dispatch and overridden by the child classes.
Methods¶
Here each of the available methods are listed.
CppAppCommand_Init¶
Initialize the command father object, this means initialize the ID repo (for having an incremental ID different every time), the source repo and the repo for the TCP Client (the object from the Sender.lvclass that corresponds to the TCP Client).
Having a repo for each of this values allows the system to work without needing to pass the parent object to all the windows, it is initialized at the application launch and the values are stored in the repos and are available just with an empty object of the parent class.
CleanUp¶
Release queues from the different repos.
Enable¶
Send Enable Command to TMA.
Home¶
Send Command to Perform Home operation
Move¶
Send Move command to TMA
MoveVelocity¶
Send Move Velocity command to TMA
ResetAlarm¶
Send Reset Alarm Command to TMA
SendCMD¶
This VI generates the TCP message for the specified command and with the specified parameters and sends it to the TCP Client module to send it over TCP to the TMA. Is meant to be used by the child classes for each of the commands they have to send.
SendPowerCMD¶
Send power command to TMA
Stop¶
Send Stop to TMA
Tracking¶
Send Tracking Command to TMA
Childs¶
The list of the available childs and the methods that use each of them correspond to the existing subsystems and the corresponding commands for each subsystem.
CppAppACWCMD.lvclass¶
This class corresponds to the commands available for the Azimuth Cable Wrap subsystem, the methods in this class are:
EnableTrack
Move
MoveVelocity
ResetAlarm
SendPowerCMD
Stop
TrackTarget
CppAppACWDrivesCMD.lvclass¶
This class corresponds to the commands available for the Azimuth Cable Wrap drives subsystem, the methods in this class are:
Enable
ReadDriveIdent
ResetAlarm
WriteDriveIdent
CppAppAZCMD.lvclass¶
This class corresponds to the commands available for the Azimuth subsystem, the methods in this class are:
Home
Move
MoveVelocity
ResetAlarm
SendPowerCMD
Stop
Tracking
CppAppAZDrivesCMD.lvclass¶
This class corresponds to the commands available for the Azimuth drives subsystem, the methods in this class are:
Enable
ReadDriveIdent
ResetAlarm
WriteDriveIdent
CppAppAZThermalCMD.lvclass¶
This class corresponds to the commands available for the Azimuth drives thermal subsystem, the methods in this class are:
ControlMode
ReadAZThermalIdent
ResetAlarm
SendPowerCMD
WriteAZThermalIdent
CppAppBALCMD.lvclass¶
This class corresponds to the commands available for the Balancing subsystem, the methods in this class are:
Enable
Move
MoveVelocity
ReadElementIdent
ResetAlarm
SendPowerCMD
Stop
WriteElementIdent
CppAppCabinet0101CMD.lvclass¶
This class corresponds to the commands available for the Cabinet 0101 subsystem, the methods in this class are:
ControlMode
ResetAlarm
SendPowerCMD
CppAppCabinetCMD.lvclass¶
This class corresponds to the commands available for the Main Cabinet subsystem, the methods in this class are:
ResetAlarm
TrackExtTemp
CppAppCCWCMD.lvclass¶
This class corresponds to the commands available for the Camera Cable wrap subsystem, the methods in this class are:
EnableTrack
Move
MoveVelocity
ResetAlarm
SendPowerCMD
Stop
TrackTarget
CppAppCCWDrivesCMD.lvclass¶
This class corresponds to the commands available for the Camera Cable Wrap drives subsystem, the methods in this class are:
Enable
MoveVelocity
ReadDriveIdent
ResetAlarm
WriteDriveIdent
CppAppCommaderCMD.lvclass¶
This class corresponds to the commands available for the Commander subsystem, the methods in this class are:
AskCommand
PublishOnly
SystemReady
CppAppDPCMD.lvclass¶
This class corresponds to the commands available for the Deployable Platform subsystem, the methods in this class are:
LockExtension
MoveVelocity
ReadPlatformIdent
ResetAlarm
SendPowerCMD
Stop
WritePlatformIdent
CppAppEIBCMD.lvclass¶
This class corresponds to the commands available for the Encoder subsystem, the methods in this class are:
ClearHeadsError
HardwareReset
ReadElementIdent
ResetAlarm
SendPowerCMD
SendReferenceStartCMD
SendReferenceStopCMD
WriteElementIdent
CppAppELCMD.lvclass¶
This class corresponds to the commands available for the Elevation subsystem, the methods in this class are:
Home
Move
MoveVelocity
ResetAlarm
SendPowerCMD
Stop
Tracking
CppAppELDrivesCMD.lvclass¶
This class corresponds to the commands available for the Elevation drives subsystem, the methods in this class are:
Enable
ReadDriveIdent
ResetAlarm
WriteDriveIdent
CppAppELThermalCMD.lvclass¶
This class corresponds to the commands available for the Elevation drives thermal subsystem, the methods in this class are:
ControlMode
ReadELThermalIdent
ResetAlarm
SendPowerCMD
WriteELThermalIdent
CppAppLPCMD.lvclass¶
This class corresponds to the commands available for the Locking Pins subsystem, the methods in this class are:
LP_Free
LP_Lock
LP_Test
Move
MoveVelocity
ReadPinIdent
ResetAlarm
SendPowerCMD
Stop
WritePinIdent
CppAppMainAxesCMD.lvclass¶
This class corresponds to the commands available for the Main Axes subsystem, the methods in this class are:
MoveToTarget
Stop
TrackTarget
CppAppMCCMD.lvclass¶
This class corresponds to the commands available for the Mirror Cover subsystem, the methods in this class are:
MCClose
MCOpen
Move
MoveVelocity
ReadSectorIdent
ResetAlarm
SendPowerCMD
Stop
WriteSectorIdent
CppAppMCLCMD.lvclass¶
This class corresponds to the commands available for the Mirror Cover Locks subsystem, the methods in this class are:
MCL_Close
MCL_Open
Move
MoveVelocity
ReadMirrorLockIdent
ResetAlarm
SendPowerCMD
Stop
WriteMirrorLockIdent
CppAppModbusTempControllersCMD.lvclass¶
This class corresponds to the commands available for the Modbus Temperature Controllers subsystem, the methods in this class are:
FanPower
ReadDriveIdent
ResetAlarm
Setpoint
WriteDriveIdent
CppAppMPSCMD.lvclass¶
This class corresponds to the commands available for the Main Power Supply subsystem, the methods in this class are:
ResetAlarm
SendPowerCMD
CppAppOSSCMD.lvclass¶
This class corresponds to the commands available for the Oil Supply System subsystem, the methods in this class are:
ResetAlarm
SendAbortPoweringCMD
SendChangeModeCMD
SendCoolingPowerCMD
SendMainPumpPowerCMD
SendOilPowerCMD
SendPowerCMD
CppAppSafetyCMD.lvclass¶
This class corresponds to the commands available for the Safety subsystem, the methods in this class are:
SafetyReleaseOverride
SafetyReset
SafetySetOverride
CppAppTECCMD.lvclass¶
This class corresponds to the commands available for the Top End Chiller subsystem, the methods in this class are:
ResetAlarm
SendPowerCMD
TrackExtTemp
CppAppTFCMD.lvclass¶
This class corresponds to the commands available for the Transfer Function subsystem, the methods in this class are:
ExcitationConfig
ResetAlarm
GetEventfromTMA.lvclass¶
This class is responsible of parsing the events from the TMA received by the TCP Client and generate the corresponding events inside the HMI application.
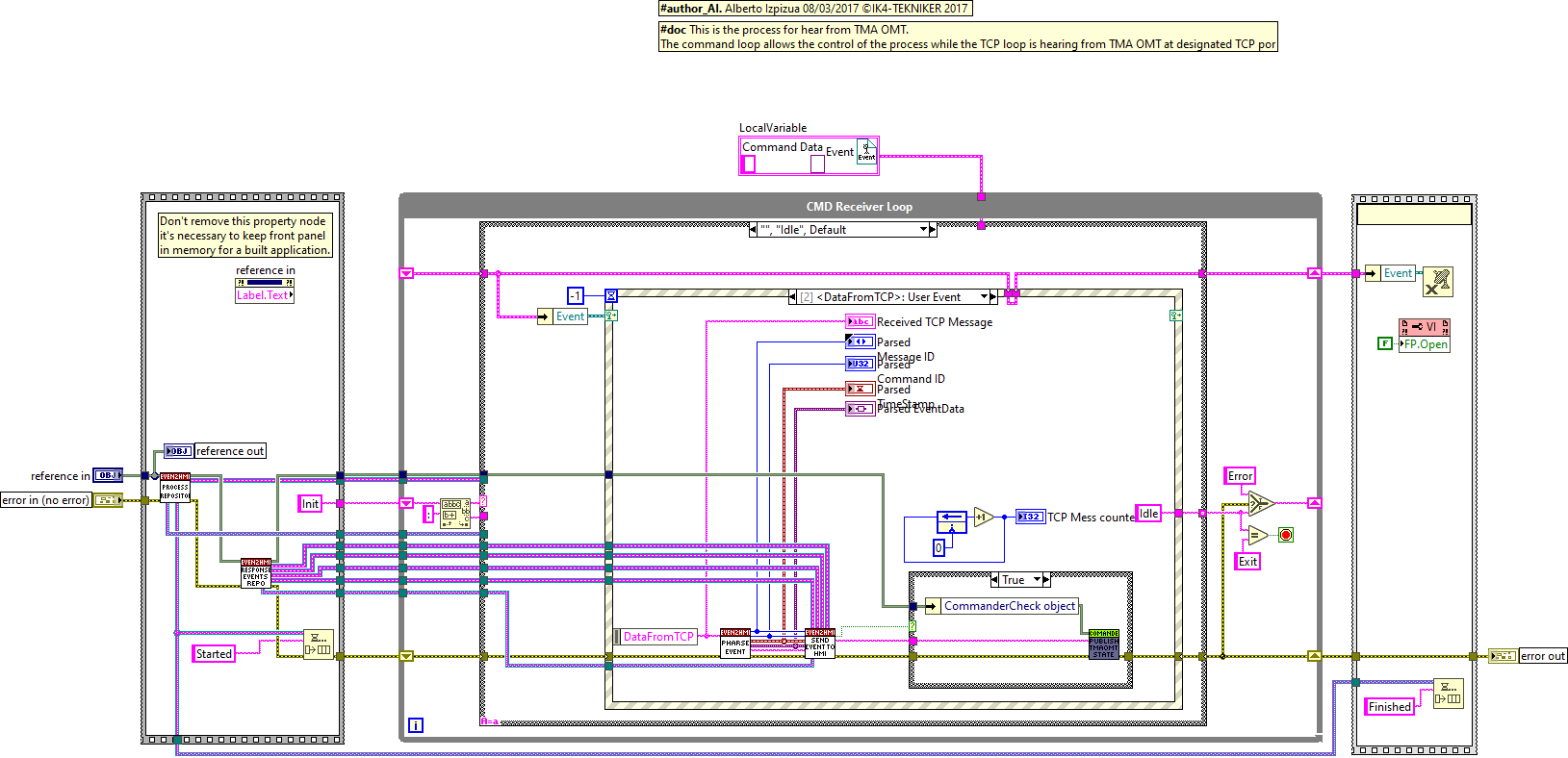
Task process¶
This task was created using the NI GOOP Developing Suite, this task is object oriented and the communication between methods is done using queues and user events. The task main is contained in the process.vi, here there is one loop. The loop is used for CMD reception, see Figure \ref{figurethirty-three69459e04fb4b90c71b521567c9afc8ef}. This process has only one instance that manages all the received events from the TMA.
Task methods¶
Here the available methods for this task are explained.
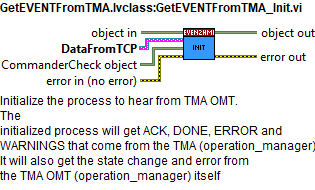
GetEVENTFromTMA_Init.vi¶
Initialize the process to hear from TMA OMT.
The initialized process will get ACK, DONE, ERROR and WARNINGS that come from the TMA (operation_manager). It will also get the state change and error from the TMA OMT (operation_manager) itself.
CleanUp¶
Stop task process and destroy user events.
ControlProcessWindow¶
This VI is used to show or hide the process front panel. Depending on the ShowProcessWindow control value.
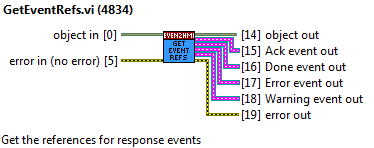
GetEventRefs¶
This VI is used to return the references to the different events: ack, done, error and warning.
CMD Reception loop¶
This loop receives the commands from the public methods and executes the corresponding actions. This loop has a state for each method as well as some other states used for loop managing, each state is explained in the next sections.
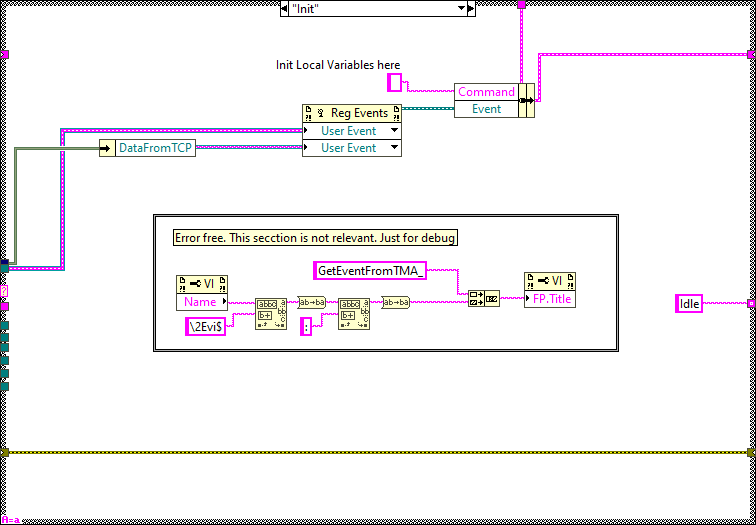
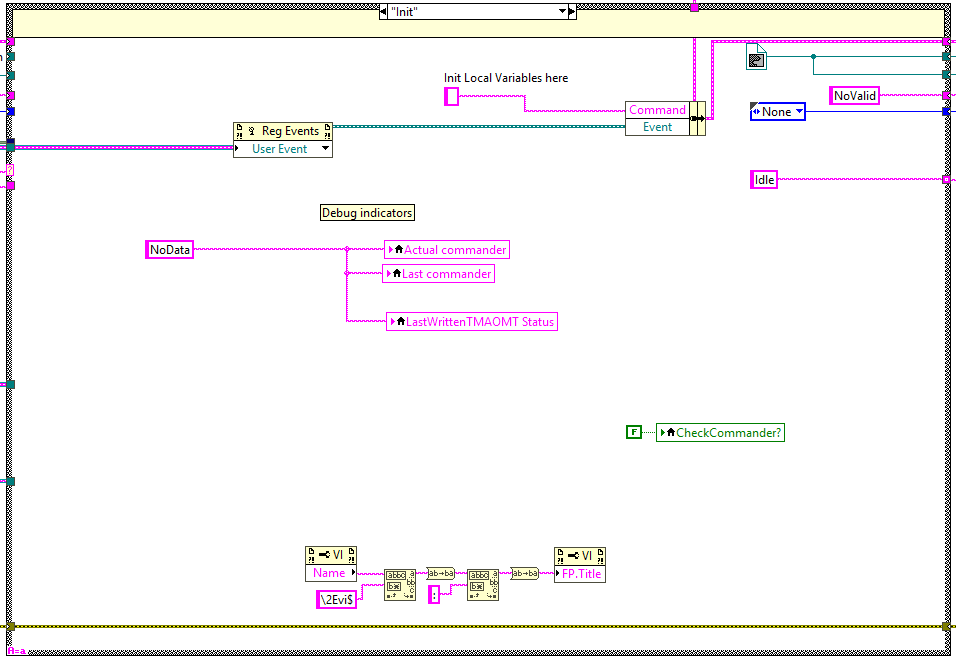
Init¶
This state is just executed once and is the first executed one. Here the initialization actions are executed. These are:
Initialization of local variable
Registration of events for the event structure
Updating the displayed name of the VI for debug purposes
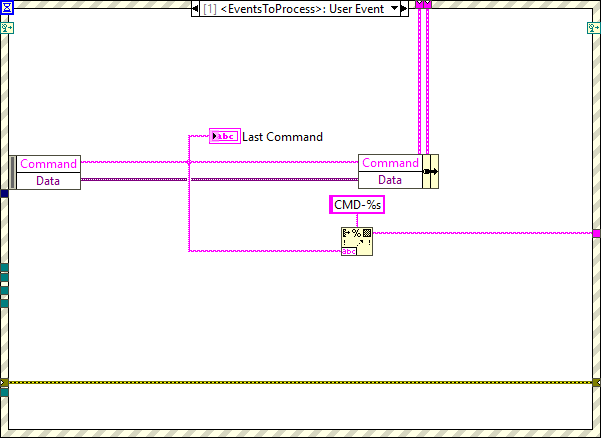
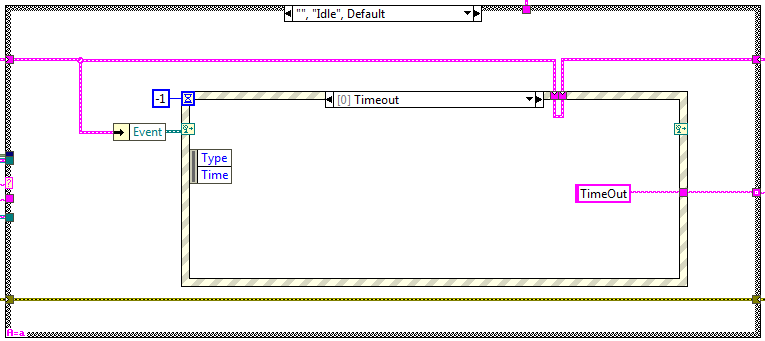
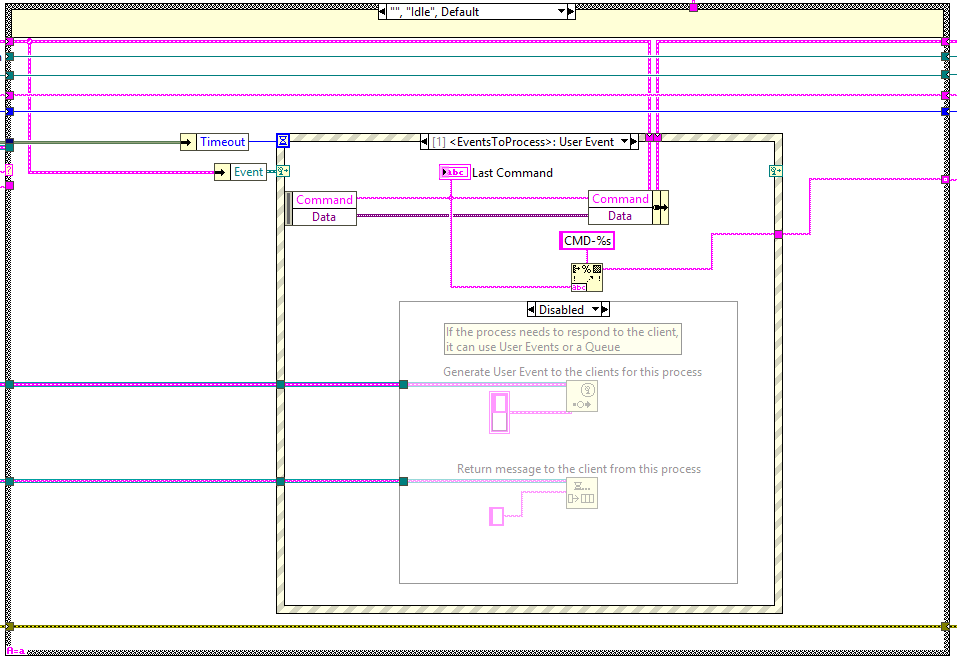
Idle¶
This state is executed constantly after executing every new CMD, here the events created at the methods are received and executed in the next iteration, in the event called “EventsToProcess” see Figure \ref{figureforty0ffa46f585c98b683a6134b3b50cf30d}.
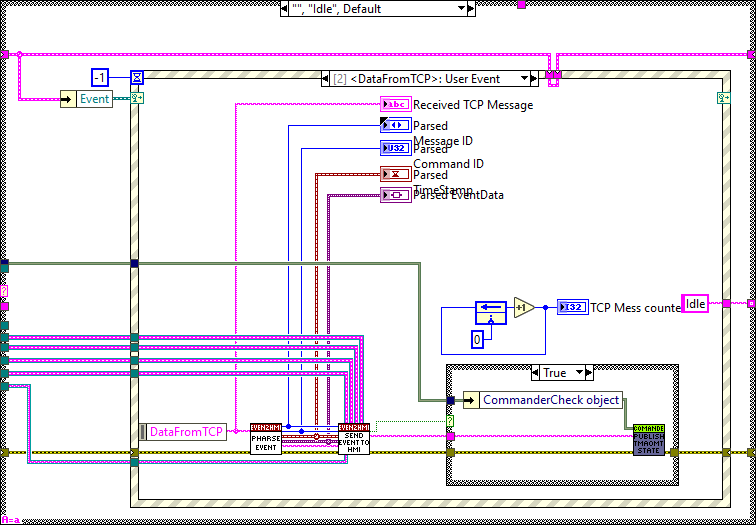
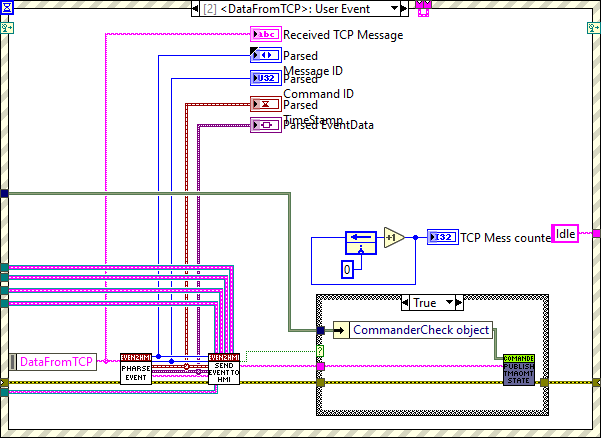
In addition to this, the TCP messages received from the TCP Client as user events are received and parsed, the event that receives the TCP messages is called “DataFromTCP” see Figure \ref{figureforty-onef00e25525f869863dacc2c4672994d39}. The TCP messages are parsed and the appropriate user events are generated, these events are:
Ack event: this event is used to transmit the received ack or no ack events.
Done event: this event is used to transmit the done events.
Error event: this event is used to transmit the received fault events.
Warning event: this event is used to transmit the received warning events.
Version event: this event is used to transmit the version from the TMA.
With some messages no user events are generated. These cases are:
StateInfo: when this message is received the state of the TMA is updated using the methods from the TMAOMTMonitoring.lvclass. For “State” submessages from the StateInfo messages the state of the TMA statemachine must be updated, to do so the PublishTMAOMTState method from the CommanderCheck.lvclass is used.
InPosition: not used in the HMI application.
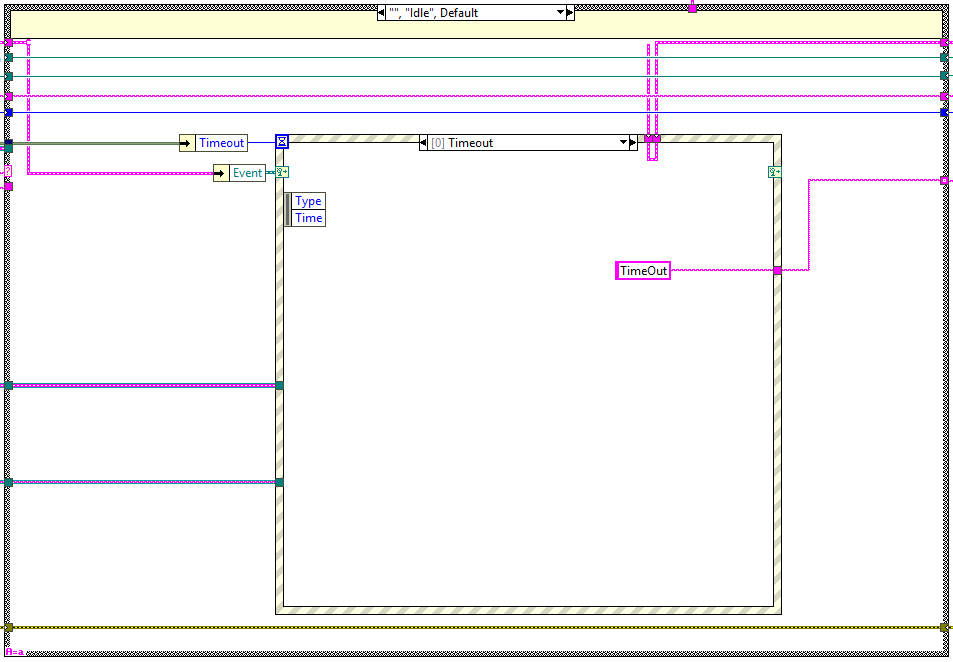
Timeout¶
This state is executed when there is something that must be executed in the specified timeout of the Idle state event structure, see Figure \ref{figureforty-twoffea54a30df54a93c2d371689872356d}.
ShowWindow¶
This state is used to show the front panel of the process.
HideWindow¶
This state is used to hide the front panel of the process.
Shutdown¶
This state is reached when the shutdown CMD is received. This loop is used to stop the CMD receiver loop.
Error¶
This state is reached when an error occurs at the task, here the error is published and cleared for the next iteration.
TMAOMTMonitoring task #TODO: To be updated¶
This task is responsible of monitoring the TMA OMT status.
Here the CSC connection status, CSC commands, CSC Events and TMA OMT actual state are received and saved.
Task process¶
This task was created using the NI GOOP Developing Suite, this task is object oriented and the communication between methods is done using queues and user events. The task main is contained in the process.vi, here there is a single loop. This loop contains both the CMD reception and the CMD actions execution. This process has only one instance that manages all the received data.
Task methods¶
Here the available methods for this task are explained.
TMAOMTMonitoring_Init.vi¶
This VI is used to launch the process.
CleanUp¶
This VI is used to stop the task and release all the references generated for this task.
ControlProcessWindow¶
This VI is used to show or hide the process front panel. Depending on the ShowProcessWindow control value.
NewTMAState¶
This VI is used to send the new TMA OMT state string to the process and update the memory.
SetTCSCommStatus¶
This VI is used to send the TCS connection status to the process and update the memory.
GetTMAStatus¶
This VI is used to get the status of the TMA OMT from the task.
NEWTCSCmd¶
This VI is used to send the last command received from the TCS to the process and update the memory.
GetCMDHistory¶
This VI is used to get the last 100 CMDs received from the TCS.
GetEventHistory¶
This VI is used to get the last 100 events received from the TCS.
NEWTCSEvent¶
This VI is used to send the last event received from the TCS to the process and update the memory. This is not used for error or waring events.
Main loop¶
This loop receives the CMDs from the methods and executes them in the same loop. The different states of the loop are explained in the following sections.
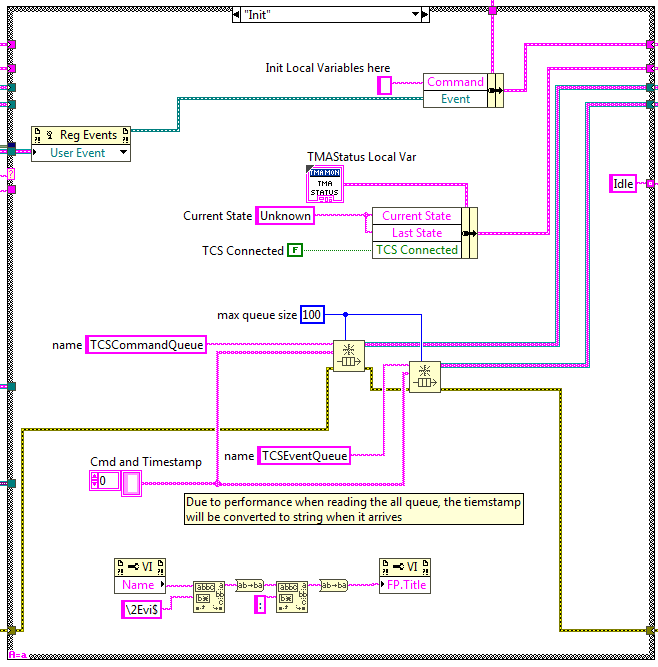
Init¶
Here the initialization actions are executed.
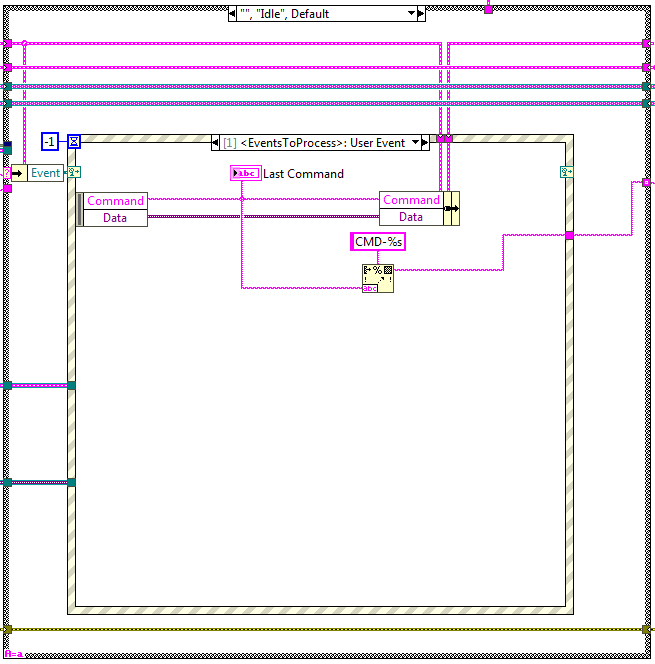
Idle¶
This state is executed constantly after executing every new CMD, here the events created at the methods are received and executed in the next iteration.
Timeout¶
This state is executed when there is something that must be executed in the specified timeout of the Idle state event structure, see Figure \ref{figuresixty-one5a9d7a30173c7114968eb1d6689ee85b}.
ShowWindow¶
This state is used to show the front panel of the process.
HideWindow¶
This state is used to hide the front panel of the process.
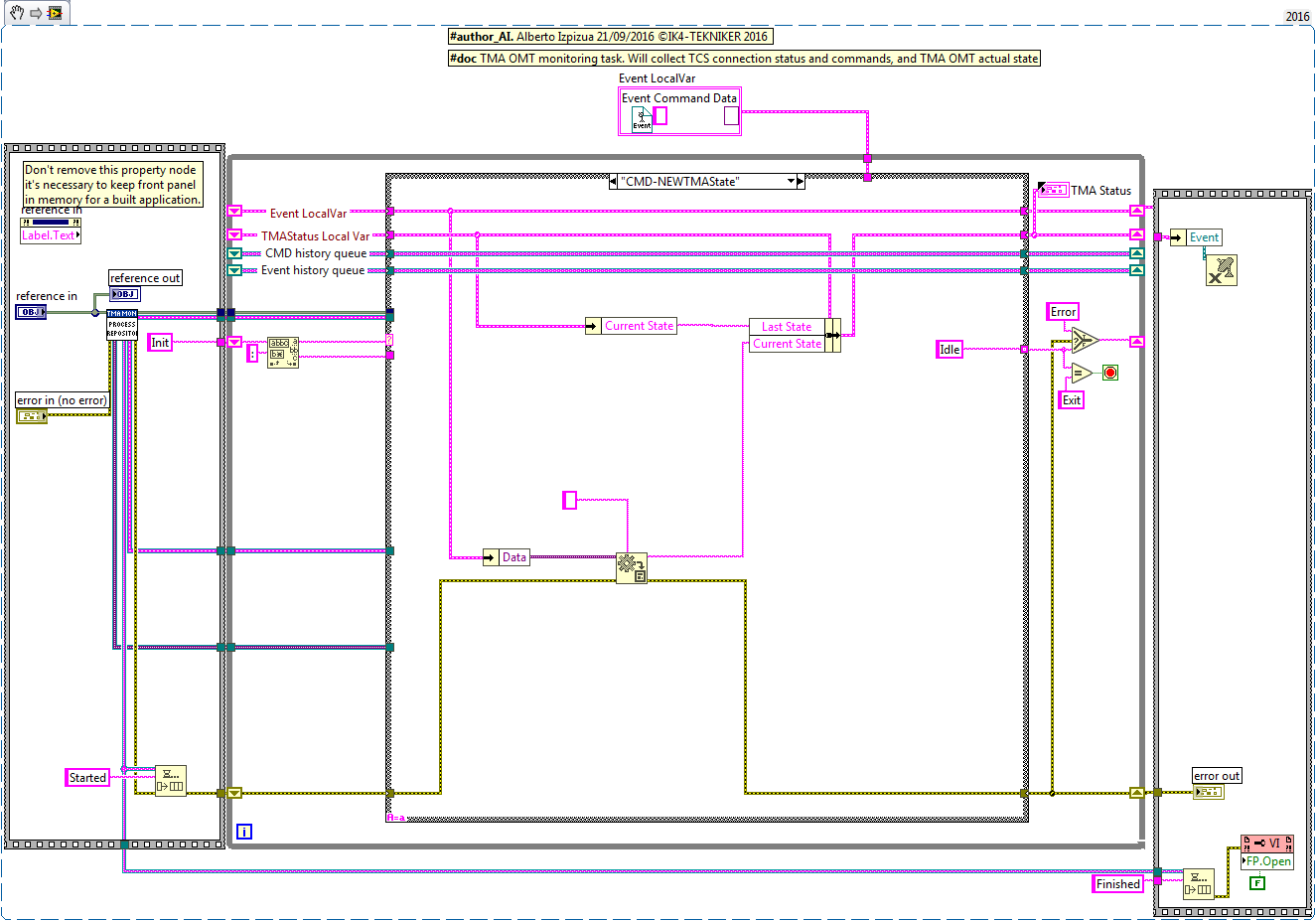
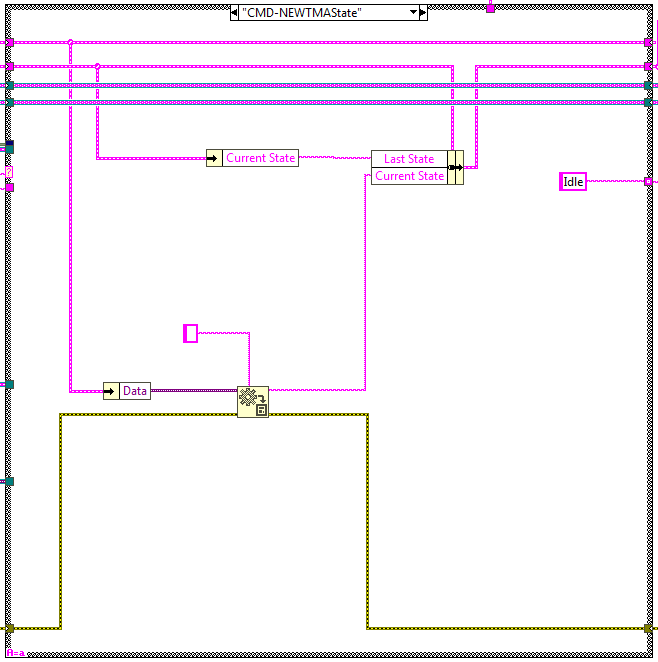
NEWTMAStateSendEVENT¶
This state is executed when the NEWTMAState method is used. Here the received string from the calling method is saved into the TMA Status Local Var register as current state.
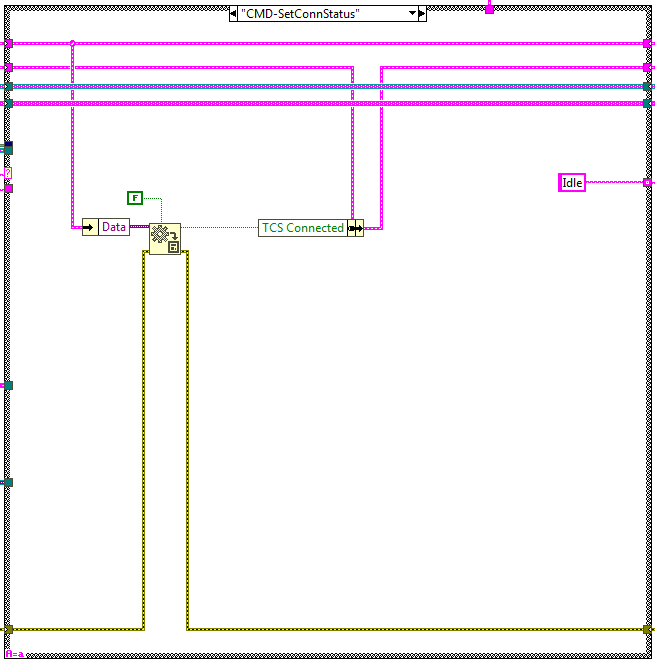
SetConnStatus¶
This state is executed when the SetTCSCommStatus method is used. Here the received boolean from the calling method is saved into the TMA Status Local Var register as current connection status.
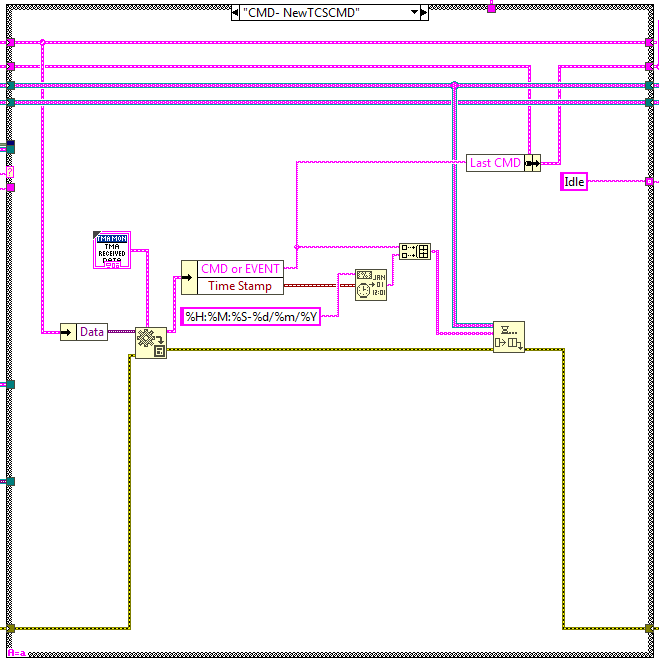
NewTCSCMD¶
This state is executed when the NewTCSCMD method is used. Here the received structure from the calling method is saved into the CMD history queue and TMA Status Local Var register as last CMD.
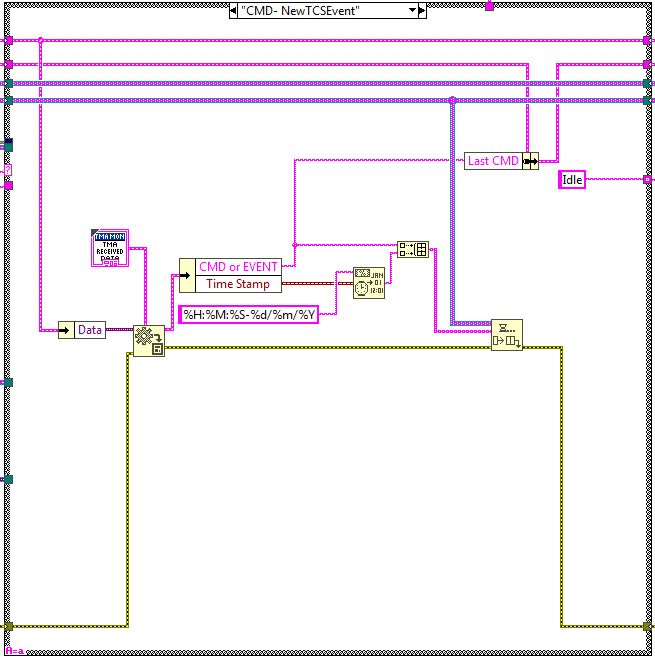
NewTCSEvent¶
This state is executed when the NewTCSEvent method is used. Here the received structure from the calling method is saved into the Event history queue and TMA Status Local Var register as last CMD.
GetStatus¶
This state is executed when the GetTMAStatus method is used. Here the TMA Status Local Var register value is used as response to the calling method, the response is given at the “QueueFromProcess” queue.
GetCMDHistory¶
This state is executed when the GetCMDHistory method is used. Here the CMD History queue elements are used as response to the calling method, the response is given at the “QueueFromProcess” queue.
GetEventHistory¶
This state is executed when the GetEventHistory method is used. Here the Event History queue elements are used as response to the calling method, the response is given at the “QueueFromProcess” queue.
Error¶
This state is reached when an error occurred at the loop. Here the error is posted to the event from process to be handled by the general error handler.
Shutdown¶
This state is reached when the shutdown CMD is received. This loop is used to stop the loop and close the connection to the TMA OMT.
CommanderCheck task #TODO: To be updated¶
This task will be waiting for commands form outside and, in the timeout, will check the actual commander var. If the commander has changed an event will be placed in Events from process with new data.
Task process¶
This task was created using the NI GOOP Developing Suite, this task is object oriented and the communication between methods is done using queues and user events. The task main is contained in the process.vi, here there is a single loop. This loop contains both the CMD reception and the CMD actions execution. This process has only one instance that manages all the received data.
Task methods¶
Here the available methods for this task are explained.
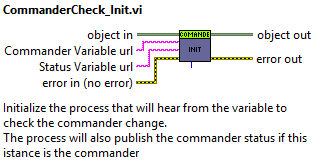
CommanderCheck_Init¶
This VI is used to launch the process, to do so some inputs are required:
Commander Variable URL: a string with the URL of the CommanderVariable that the process will use to know if the commander has changed and how is the new commander.
Status Variable URL: a string with the URL of the Status Variable that the process will use publish the last TMA OMT status.
CleanUp¶
This VI is used to disconnect vars, stop the task and release all the references generated for this task.
ControlProcessWindow¶
This VI is used to show or hide the process front panel. Depending on the ShowProcessWindow control value.
GetCommander¶
This VI is used to get the current commander. It also tells if the status is valid or not, but only after the first read of the variable is done.
DisconnectVars¶
This VI is used to disconnect the shared variables used by the task.
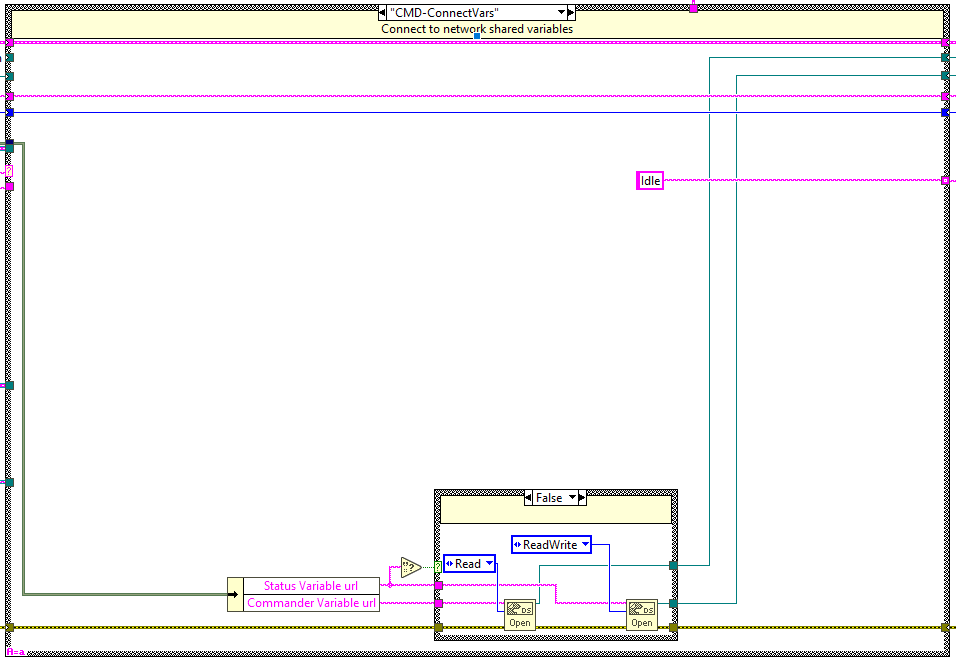
ConnectVars¶
This VI is used to connect the shared variables used by the task.
GetCommanderEventRef¶
This VI is used to get the ref to the events triggered by the task.
PublishTMAOMTState¶
This VI is used to send the last TMA OMT state to the process and update the Status Variable.
ActivateChecking¶
This VI is used to activate or de activate the checking of the commander.
Main loop¶
This loop receives the CMDs from the methods and executes them in the same loop. The different states of the loop are explained in the following sections.
Init¶
Here the initialization actions are executed.
Idle¶
This state is executed constantly after executing every new CMD, here the events created at the methods are received and executed in the next iteration.
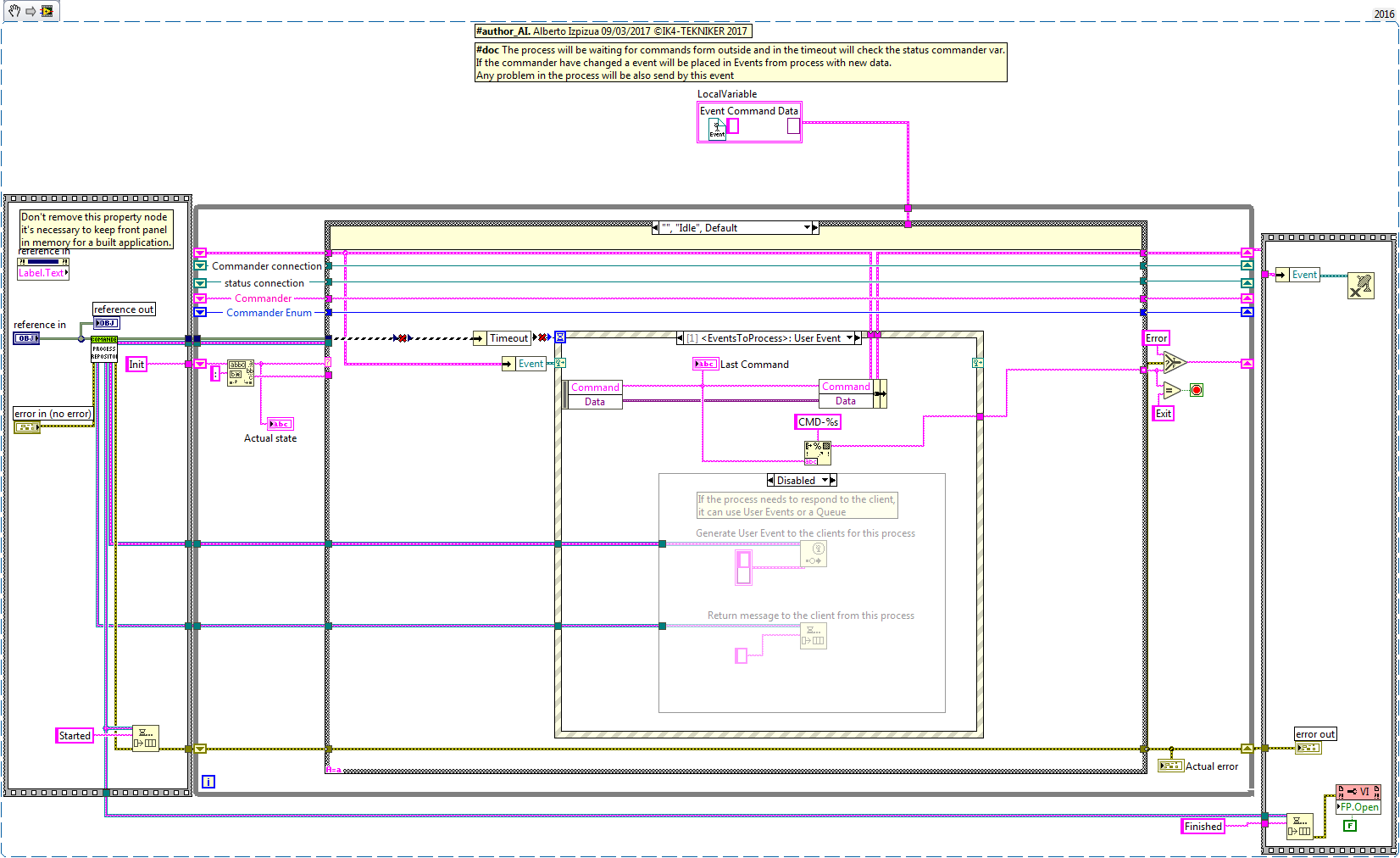
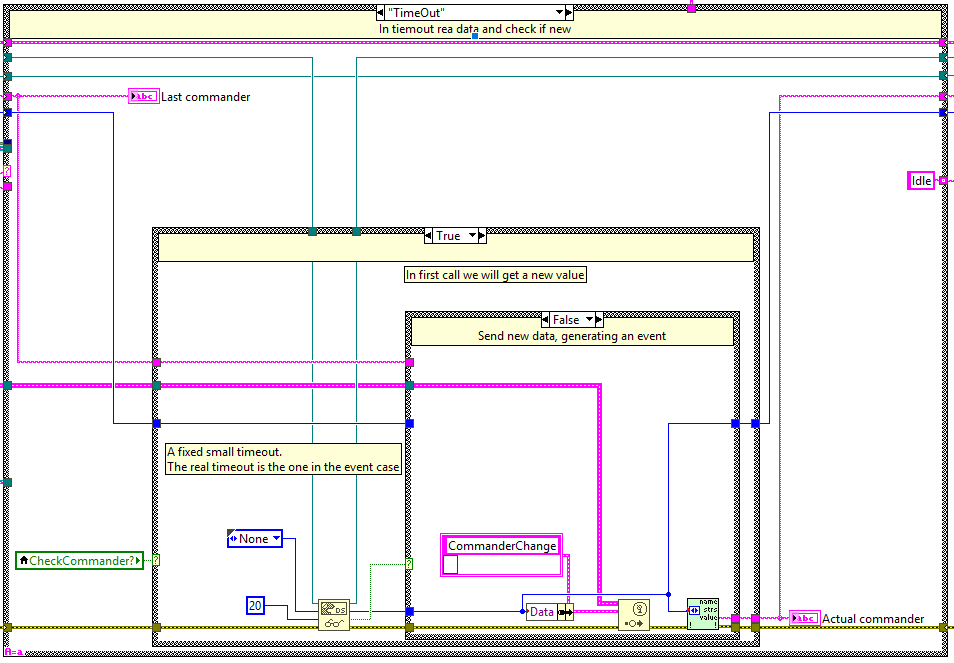
Timeout¶
This state is executed when there is something that must be executed in the specified timeout of the Idle state event structure. In this timeout, see Figure 87, the commander is checked by reading the commander variable. If this variable has new data a commander change event is triggered.
ShowWindow¶
This state is used to show the front panel of the process.
HideWindow¶
This state is used to hide the front panel of the process.
ConnectVars¶
This state is executed when the ConnectVars method is used. Here the variable references specified at the init are connected.
DisconnectVars¶
This state is executed when the DisconnectVars method is used. Here the variable references are disconnected.
GetCommander¶
This state is executed when the GetCommander method is used. Here the actual commander register is used as response to the calling method, the response is given at the “QueueFromProcess” queue.
PublishState¶
This state is executed when the PublishTMAOMTState method is used. Here the string specified at the method is written to the status connection variable.
ActivateChecking¶
This state is executed when the ActivateChecking method is used. Here the Boolean value specified to the method is used to set the value of the “CheckCommander?” Local variable.
Error¶
This state is reached when an error occurred at the loop. Here the error is posted to the event from process to be handled by the general error handler.
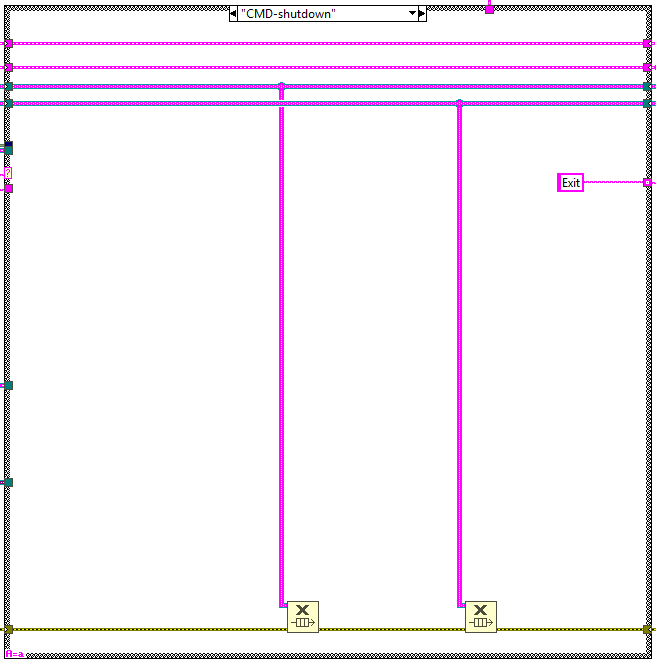
Shutdown¶
This state is reached when the shutdown CMD is received. This loop is used to stop the loop and close the connection to the variables.